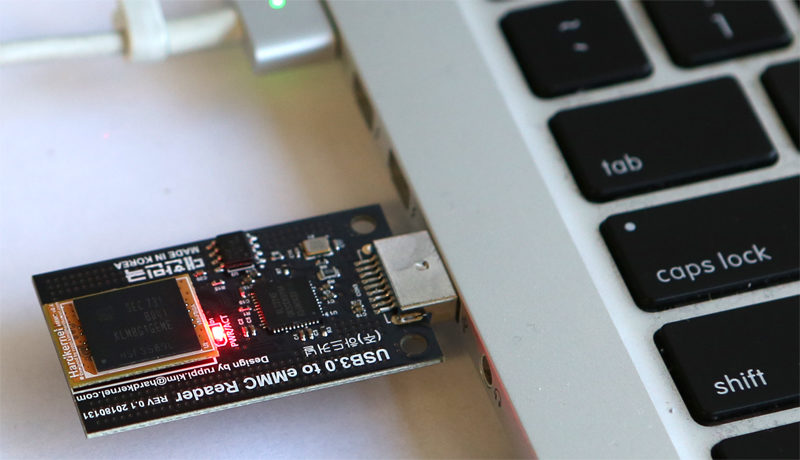
Easier and faster way to flash your OS image into the eMMC Module. With this unit, you will not need a separate USB card reader. Just attach your eMMC module directly to your PC/Mac via this writer board.
– USB 3.0 Interface
– Native eMMC 8bit wide data interface, instead of slow SD 4bit width
– Works in HS200 mode
– Windows / Mac / Linux Compatible
– Works with ODROID Orange, Red and Blue eMMC modules
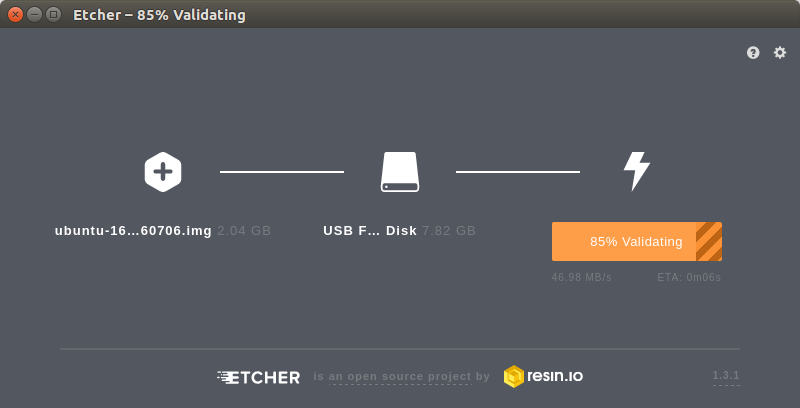
– Use with Etcher or Win32DiskImager software on your PC
– It can’t access the eMMC hidden boot blocks
– Rated Power : 5V/500mA (including eMMC module)
– Dimensions : 60x26x4.5 mm
It does not work with the Black eMMC Modules.
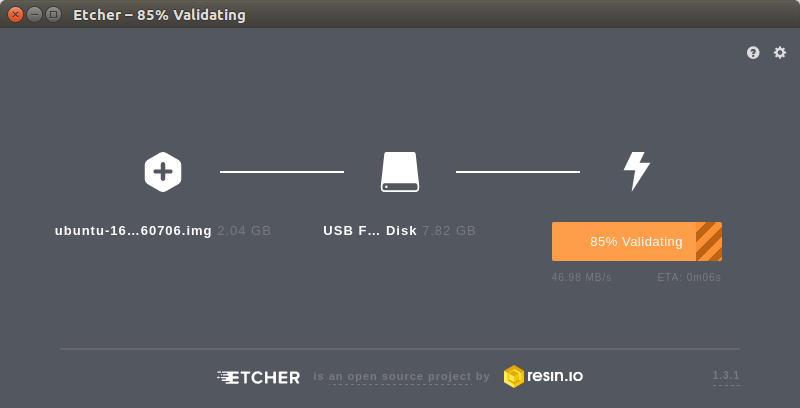
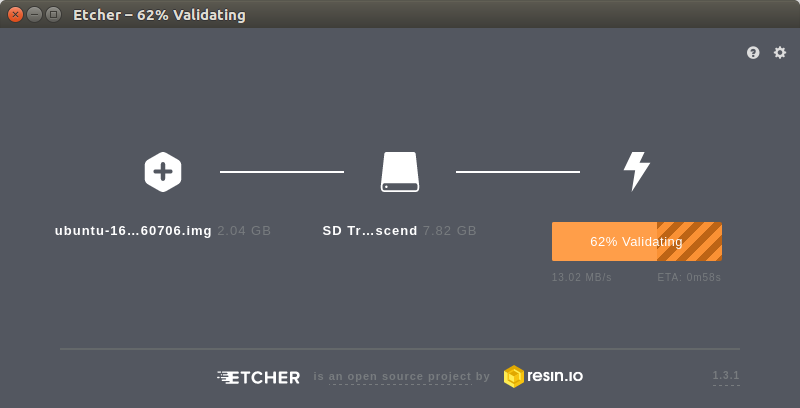
We compared the OS flashing speed between our USB 3.0 eMMC Module Writer and a generic card reader.
Test environment
1. PC : Intel(R) Core(TM) i7-7700 CPU @3.60GHz 3.60GHz / RAM 16GB / 64bit Windows 10
2. Etcher version : 1.3.1
3. eMMC : 64GB Yellow
4. Input file : ubuntu-16.04.3-4.14-minimal-odroid-xu4-20171213.img(1.63GB)
Test result
USB3.0 eMMC Module Writer : Flashing 28.18s, Validating 20.31s, Total 48.49s
Transcend USB3.0 card Reader : Flashing 93.64s, Validating 81.23s, Total 174.86s
The USB 3.0 eMMC Module Writer is 3-4 times faster than a normal USB 3.0 card reader.
With Transcend USB3.0 reader
1st trial : Flashing 93.07s, Validating 88.83s, Total 181.90s
2nd trial : Flashing 89.29s, Validating 83.55s, Total 172.84s
3rd trial : Flashing 107.65s, Validating 85.81s, Total 193.46s

With Transcend USB3.0 reader
1st trial : Flashing 93.07s, Validating 88.83s, Total 181.90s
2nd trial : Flashing 89.29s, Validating 83.55s, Total 172.84s
3rd trial : Flashing 107.65s, Validating 85.81s, Total 193.46s

More information : https://www.hardkernel.com/shop/usb3-0-emmc-module-writer-2/

 한국어
한국어