
 한국어
한국어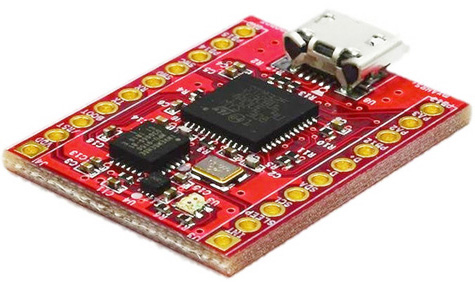
(DISCONTINUED)myAHRS+
$75.00
OBSOLETED
This product is no longer available.
For Bank transfer
| Tier | Discount rate |
|---|---|
| 5 ~ 9 | 5% |
| 10 ~ 29 | 8% |
| 30 ~ and more | 10% |
Out of stock
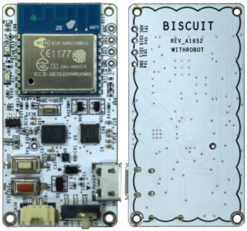
myAHRS+
The myAHRS+ is a high performance AHRS(Attitude Heading Reference System).
Its attitude output is more stable to acceleration and magnetic disturbances.
Communication and configuration are enabled via UART/USB interface for user applications. I2C interface is available for embedded application like Arduino projects.
The GUI(myAHRS+ Monitor) is available, which allows users configure all myAHRS+ settings, view attitude of myAHRS+ and IMU(Inertial Measurement Unit) data in realtime and save sensor data in a text file.
Custom user software may be developed using the myAHRS+ SDK.
Tutorial : https://github.com/withrobot/myAHRS_plus/tree/master/tutorial
Discussion : http://forum.odroid.com/viewforum.php?f=109
FEATURES
* Sensors
– Triple axis 16-bit gyroscope : ± 2000 dps
– Triple axis 16-bit accelerometer : ± 16 g
– Triple axis 13-bit magnetometer : ± 1200 μT
* On board software
– Exteneded Kalman filter
– max 100 Hz output rate
Attitude : Euler angle, Quaternion
Sensor : acceleration, rotation rate, magnetic field
* Connectivity
– USB : Virtual COM PORT
– UART : Standard baud rates up to 460800 bps
– I2C : up to 1kHz
* GUI(myAHRS+ Monitor)
– display attitude and sensor data from myAHRS+ on various viewers
– Configuration
– magnetometer calibration
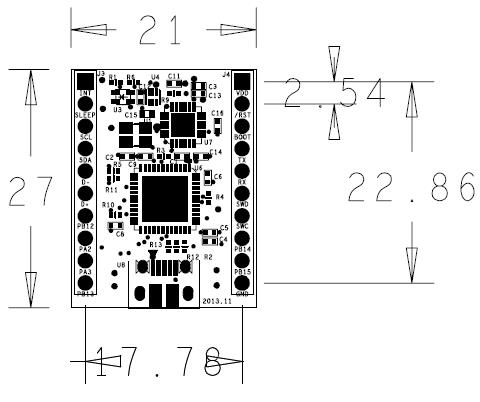
Dimensions : 21 x 27 mm
myAHRS+ Odroid C1 demo
myAHRS+ Odroid XU3 demo
Notes :
1. This product was developed & manufactured by WITHROBOT Co., LTD.
2. Board schematics and firmware source code will NOT be publicly released.
Related products
Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products

Obsolete Products
(DISCONTINUED)ODROID-VU7 : 7inch 800×480 HDMI display with Multi-touch

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products
(DISCONTINUED)oCam-1CGN-U Plus : 1MP USB 3.0 Color Global Shutter Camera

Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products

Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products
Obsolete Products

Obsolete Products
Obsolete Products
Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products
(DISCONTINUED)ODROID-MC1 : My Cluster One with 32 CPU Cores and 8GB DRAM

Obsolete Products

Obsolete Products

Obsolete Products
(DISCONTINUED)M12 Lens Set : 8/6/3/2.65mm with IR cut filter(650)

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products


Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products
Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products

Obsolete Products
Obsolete Products

Obsolete Products